本篇继 [[信号处理的设计原则]],具体学习清洗滤波层,怎么把输入的信号看清楚!
如果说物理获取层是“把矿石挖出来”,那么清洗滤波层就是“洗矿”——把泥巴(噪声)冲走,留下金子(信号)。在 CEMS 和精密仪器中,这一层通常由三道工序组成,针对三种不同类型的“脏东西”。
第一道工序:中值滤波 (Median Filter) —— 对付“捣乱分子”
敌人: 脉冲噪声。 比如:隔壁大电机启动了一下、继电器吸合打了个火花、或者是静电放电。 特征: 信号本来是 2.5V,突然变成 5.0V,下一毫秒又回到了 2.5V。
常规错误: 用平均值。
- 数据:
2.5, 2.5, 2.5, 50.0 (异常), 2.5 - 平均值:
12.0。 - 后果: 一个老鼠屎坏了一锅汤,平均值被瞬间拉高,DCS 显示瞬间超标。
正确解法:中值滤波(去头去尾)
- 算法: 就像跳水比赛打分,去掉最高分,去掉最低分,剩下的取平均;或者直接取中间那个数。
- 中值:
2.5。 - 效果: 那个
50.0的异常值直接被扔进垃圾桶,对结果 0 影响。
第二道工序:IIR / FIR 低通滤波 —— 对付“背景嘈杂”
敌人: 白噪声 (White Noise)。比如:电子热噪声、ADC 的量化误差。特征: 像蚂蚁一样密密麻麻地附着在信号线上,让读数在小数点后几位乱跳。
主力武器: 滑动平均 (Moving Average) 或 指数加权平均 (EMA)。这两种算法在单片机里极其常见,我们重点看 EMA (指数移动平均),因为它最省内存。 公式:$$Y_{now} = \alpha \times X_{input} + (1 - \alpha) \times Y_{last}$$
- $Y_{now}$:现在的输出。
- $Y_{last}$:上一次的输出。
- $X_{input}$:现在的 ADC 输入。
- **$\alpha$ (滤波系数): 0~1 之间的一个数。
- $\alpha$ 越小(如 0.01):极度相信历史经验,不相信当前输入。效果: 读数稳如泰山,但反应迟钝。
- $\alpha$ 越大(如 0.90):** 极度相信当前输入,不看历史。效果: 反应极快,但读数乱跳。
第三道工序:自适应滤波 (Adaptive Filter) —— 解决“快与稳”的矛盾
这是这一层的大 BOSS。
痛点:
- 为了环保验收,T90 响应时间必须 < 200 秒 $\to$ 需要 $\alpha$ 大(弱滤波)。
- 为了数据好看,读数不能乱跳 $\to$ 需要 $\alpha$ 小(强滤波)。
- 矛盾: 鱼和熊掌不可兼得。
解法:自适应(变档位)
算法会实时计算“当前的变化率”,然后自动调整 $\alpha$ 值。
- 静止状态:
- 算法发现:
|当前值 - 上次值| < 阈值。 - 判断:现在工况很稳,波动都是噪声。
- 动作:切换到“重滤波模式”($\alpha = 0.05$)。
- 结果:屏幕上的线条平滑得像直线。
- 算法发现:
- 突变状态:
- 算法发现:
|当前值 - 上次值| > 阈值(比如突然喷氨了)。 - 判断:这不是噪声,是真变了!
- 动作:切换到“轻滤波模式”($\alpha = 0.8$)甚至**“直通模式”**。
- 结果:读数“蹭”地一下就上去了,毫无滞后。
- 算法发现:
代码案例
写了一段代码,模拟一个从 0 跳变到 100 的信号,并加入噪声。 我们将对比:普通平均 vs 自适应滤波。
|
|
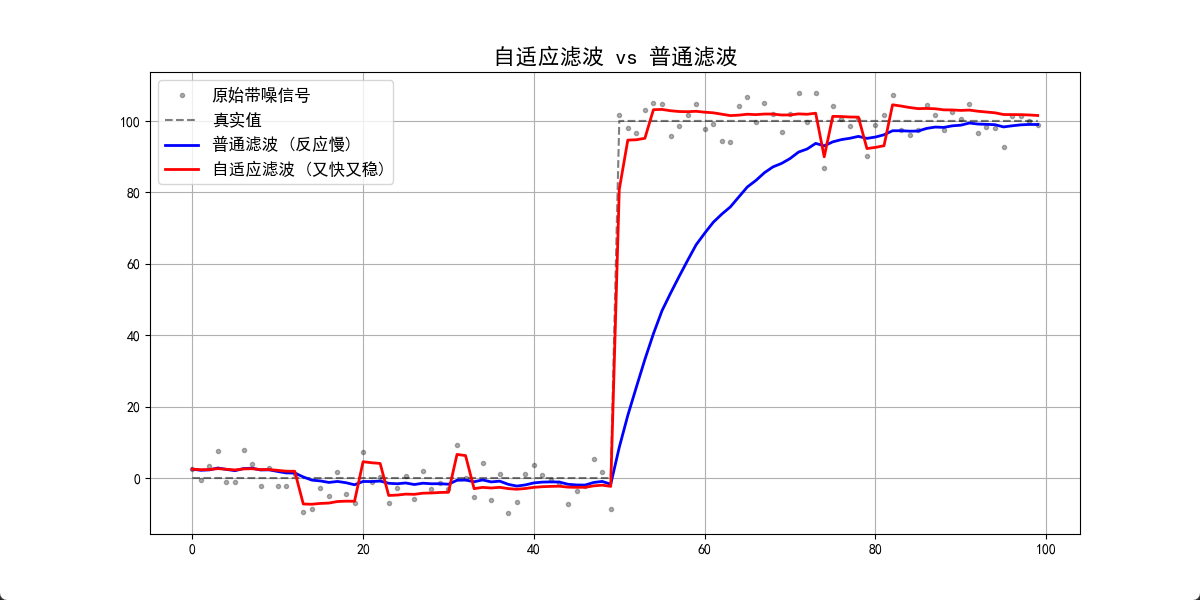
如果你运行这段代码,你会看到:
- 黑色点(原始数据): 上蹿下跳,根本没法看。
- 蓝线(普通滤波):
- 优点: 确实把噪声滤平了。
- 缺点: 它是拖泥带水的。信号在第 50 秒已经跳到 100 了,蓝线在第 70 秒才慢悠悠地爬上来。这会导致 T90 不合格。
- 红线(自适应滤波):
- 前半段(0): 非常平滑(因为它识别出没变化,用了重滤波)。
- 突变点(50): 瞬间跟上了信号的跳变(因为它识别出突变,扔掉了滤波器)。
- 后半段(100): 再次变平滑。
这就是“清洗滤波层”的最高境界:该稳的时候稳如老狗,该快的时候动如脱兔。