本篇继 [[ZZZ-23-零点校准]],演示的案例中【硬件】和【单片机配置】大体相同
如果说“零点校准”是修正坐标轴的起点,那么“满量程校准”就是修正坐标轴的斜率。
1. 为什么要进行满量程校准?
即使你把零点对齐了(4mA 对应 0),传感器在测量高浓度或高压力时,依然可能产生偏差。
- 原因:传感器内部的放大电路增益可能随温度变化,或者传感器探头灵敏度衰减。
- 结果:原本 $20mA$ 应该代表 $1.6,MPa$,结果传感器只输出了 $19.5mA$。
- 校准逻辑:我们需要给传感器一个“标准参考值”(如标准气体或已知压力),告诉单片机:“这就是满量程,请记住现在的斜率。”。
2. 数学模型:从 $y=x-b$ 到 $y=k(x-b)$
我们之前的压力计算公式可以抽象为:$$Pressure = k \cdot (V_{measured} - V_{zero})$$
- $V_{zero}$:零点电压(通过零点校准获得)。
- $k$ (斜率):这是满量程校准要修正的对象。
满量程校准的推导:当你施加一个标准满量程压力(如 $1.6,MPa$)时,记下当前的电压 $V_{full_measured}$。 那么新的斜率 $k$ 应该是:$$k = \frac{P_{nominal}}{V_{full_measured} - V_{zero}}$$ 其中 $P_{nominal}$ 是标准值的额定压力(如 1.6Mpa)
3. 代码实现方案
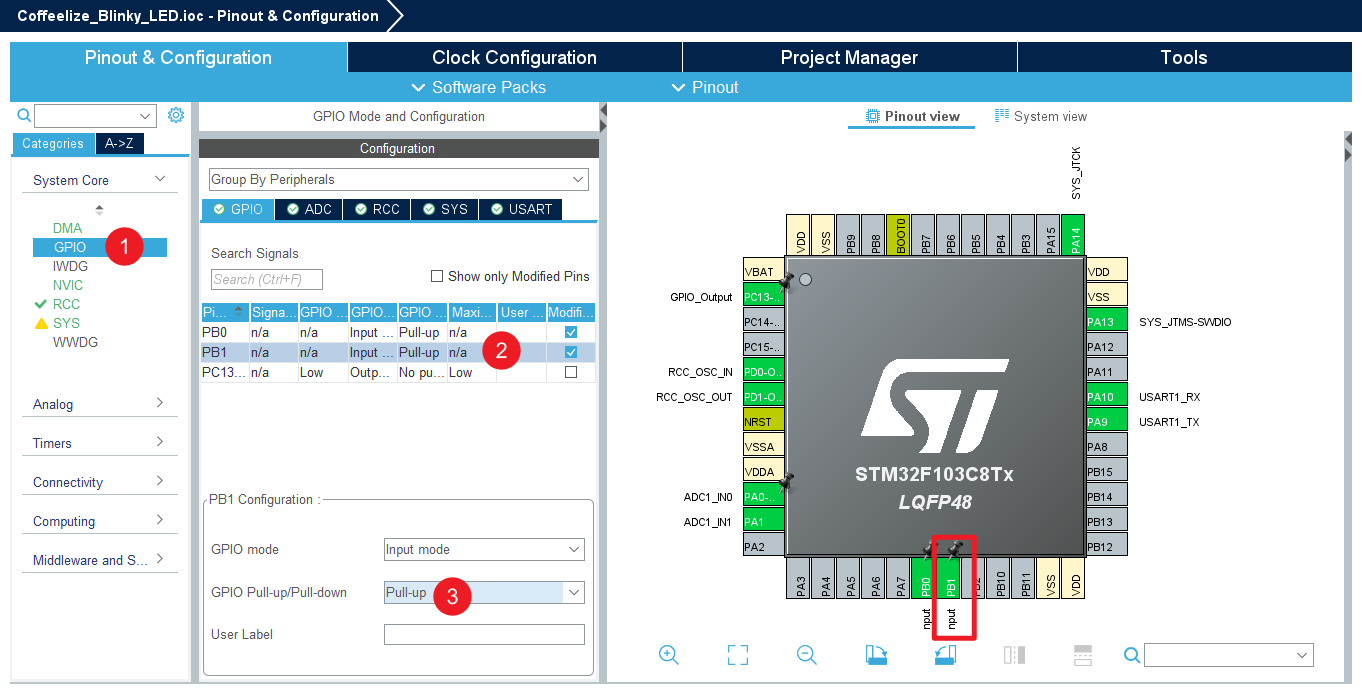
我们需要再增加一个按键逻辑(例如按键接到 PB1)来触发“满量程校准”。
|
|
|
|
|
|
|
|
4、校准实验
校准零点前
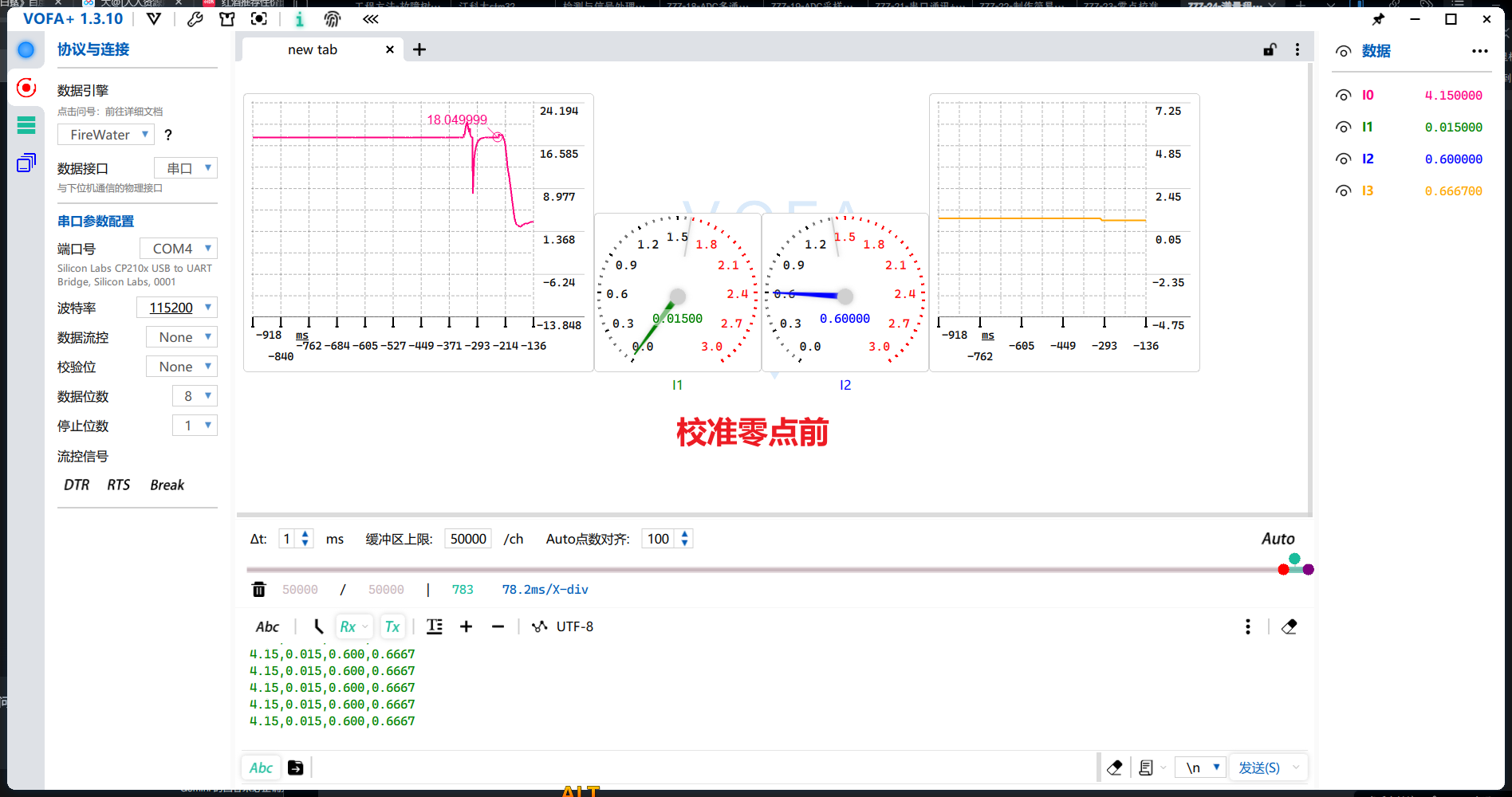
1. 零点漂移被“零点偏置电压”吸收
- 物理现象:传感器在没有压力时,输出原本应该是 $0.6V$,但因为环境温度或老化变成了 $0.65V$。这多出来的 $0.05V$ 就是“零点漂移”。
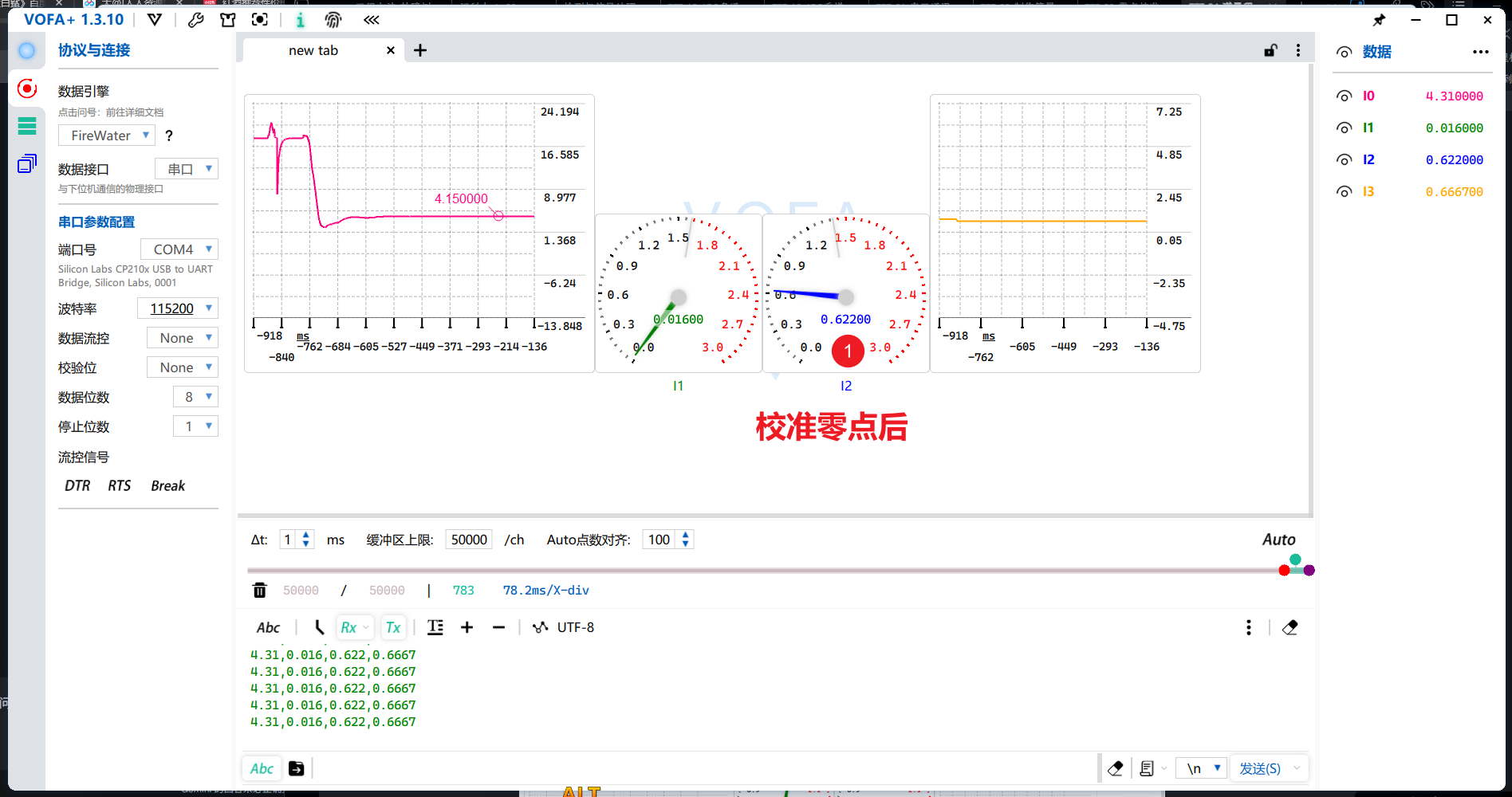
- 数学处理:你通过校准,把变量
zero_offset_volt从 $0.6$ 改成了 $0.65$。 - 理解:在公式 $(volt - zero_offset_volt)$ 中,那个多出来的 $0.05V$ 确实被
zero_offset_volt抵消(吸收)掉了。坐标轴的起点被你平移到了现在真实的位置上。
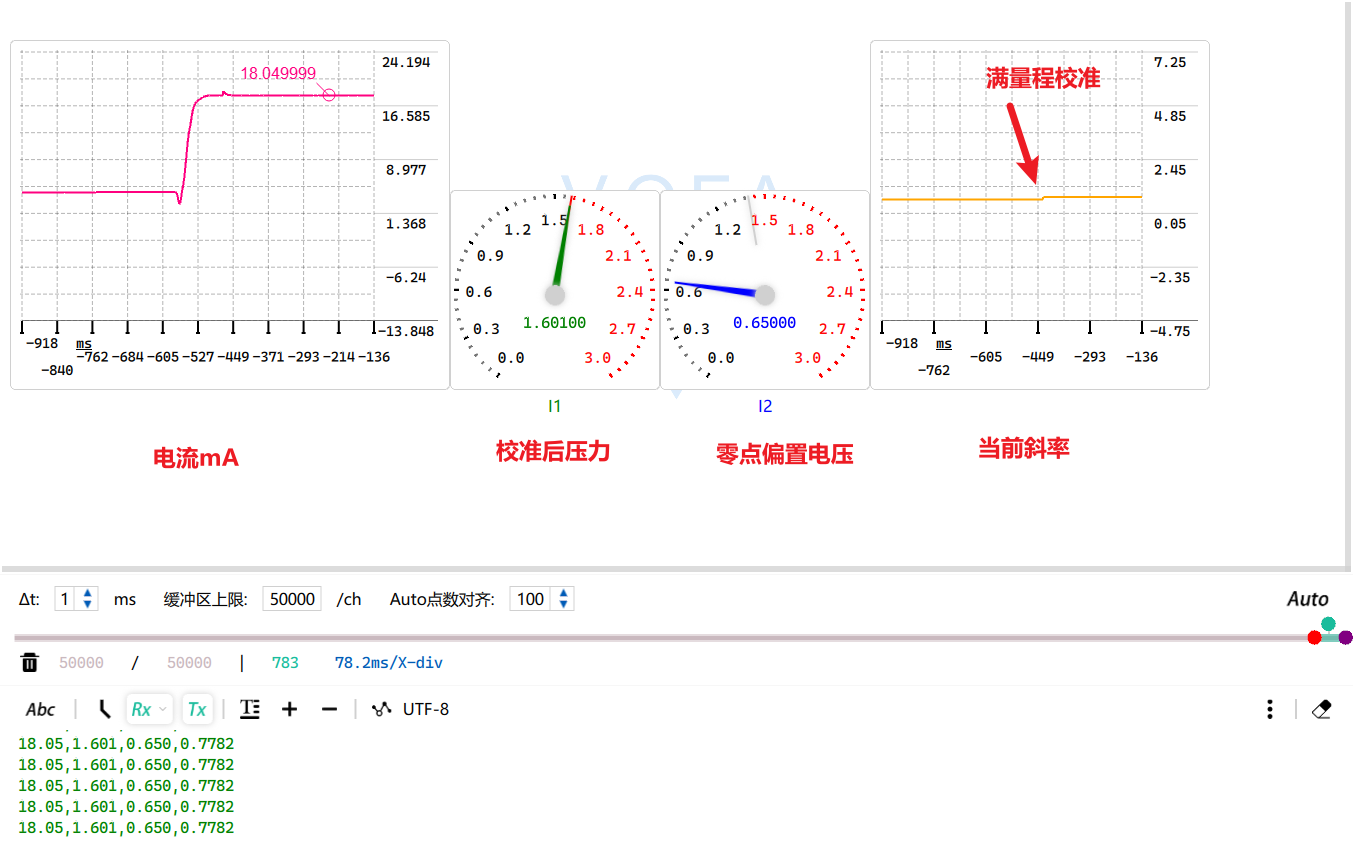
2. 量程漂移被“斜率”吸收
- 物理现象:传感器现在的“力气”变小了。以前增加 $2.4V$ 代表增加 $1.6,MPa$,现在增加 $2.4V$ 只能代表增加 $1.5,MPa$ 了。
- 数学处理:你通过满量程校准,重新计算了
slope_k。 - 理解:新的
slope_k变大了,它通过补偿增益的方式,“吸收”了传感器灵敏度的下降。它把斜斜的曲线重新拉回到了正确的高度。
换句话说,在工业仪表中,我们把传感器的所有“不完美”都归结为两个参数:
- 截距 (Intercept):由
zero_offset_volt承载,解决“从哪开始”的问题。 - 增益 (Gain/Slope):由
slope_k承载,解决“走多快”的问题。
满量程校准中的安全检查
|
|
这里重点关注:if (v_diff > 0.1f) ,为什么要这么写:
预防“数学炸弹”:防止除以零
在满量程标定中,斜率的计算公式是:$$k = \frac{P_{NOMINAL}}{V_{full} - V_{zero}}$$
- 风险:如果 $V_{full}$ 等于 $V_{zero}$(即
v_diff为 0),程序在执行除法时会触发硬件异常或者得到一个无穷大(Inf)。 - 后果:这会导致你的
calibrated_pressure变成乱码,甚至导致单片机程序卡死或复位。 - 保护:
0.1f作为一个门槛,确保了分母永远是一个有意义的正数。
操作防错:防止“误触发”标定
在 CEMS(烟气在线监测系统)的现场维护中,操作员可能会忙中出错:
- 误触:操作员本想按零点标定,却按成了满量程标定。此时传感器还没有通入标准压力或标气。
- 逻辑:此时 $V_{full}$ 几乎等于 $V_{zero}$。如果没有这个检查,单片机就会把微小的噪声(比如 $0.001V$ 的波动)当成整个量程的跨度。
- 结果:你会得到一个超级巨大的斜率 $k$。标定完后,哪怕空气稍微波动一下,显示屏上的压力数值都会疯狂飙升。
- 保护:通过检查,如果差值不到 $0.1V$,程序就会认为“这次标定不合法”,从而拒绝更新
slope_k。
为什么是 0.1f 这个值?
这个值不是绝对的,它是根据你的硬件环境估算的:
- 0.1V 对应 12 位 ADC 约 124 个数值($4095 \times \frac{0.1}{3.3}$)。
- 对于你的传感器($0.6V \sim 3.0V$),总跨度是 $2.4V$。$0.1V$ 约占满量程跨度的 4%。
- 建议:如果你在更复杂的工业现场发现干扰很大,可以将这个值调高到
0.2f或0.3f。
关于零点偏置电压和斜率
如果零点偏置电压和斜率,被校准得偏离初始值非常大,会出现什么现象
在 CEMS(烟气在线监测系统)的运维中,如果校准参数(零点和斜率)偏离初始值过大,通常意味着系统正在失去“测量能力”。这种现象在工业上被称为“量程压缩”或“分辨率退化”。我们可以把这种情况形象地比喻成“老花镜”失效了。
1. 如果“零点偏置电压”偏离过大
假设原本零点是 $0.6V$,现在被校准到了 $2.0V$。
- 现象 A:有效量程变窄(Range Compression)
- STM32 的 ADC 最高只能测到 $3.3V$。如果零点占用了 $2.0V$,那么留给实际信号的范围就只剩下 $3.3V - 2.0V = 1.3V$。原本你可以用 $2.4V$ 的跨度来表现 $1.6,MPa$,现在只能用一半的电压范围来表现,测量精度直接减半。
- 现象 B:提前出现“削顶”
- 当压力还没达到满量程时,ADC 已经读到了 $4095$(满位)。在 VOFA+ 上你会看到压力曲线在还没到顶时就变成了一条平平的直线,数据丢了。
2. 如果“斜率 $k$”偏离过大
斜率 $k$ 本质上是一个“放大倍数”。
- 情况一:$k$ 变得特别大(高增益)
- 现象:系统变得极其敏感且神经质。哪怕 ADC 只有 1 个数值的微小跳动,乘以巨大的 $k$ 之后,显示的压力值都会在 VOFA+ 上剧烈抖动。
- 本质:你正在放大噪声。这种情况通常说明传感器已经“衰减”得很厉害了,给出的信号极其微弱,你不得不拼命放大它。
- 情况二:$k$ 变得特别小(低增益)
- 现象:系统变得迟钝。无论你如何调节电位器,压力数值几乎不动,或者变化非常缓慢。
- 本质:这通常发生在误操作标定时,或者传感器发生了“短路”性质的故障。
CEMS 工业实战中的判定逻辑
在专业的 CEMS 仪表中,我们不会任由参数无限偏离。我们会设置“标定限值(Calibration Limits)”**:
工业逻辑示例:
- 如果
zero_offset_volt偏离初始值超过 $\pm 20%$。- 或者
slope_k偏离初始值超过 $\pm 30%$。- 结果:单片机直接报错 “Calibration Error”,并拒绝更新参数。
为什么要这样做?因为参数偏离这么大,说明不是简单的漂移,而是硬件出问题了:
- 传感器探头脏了(需要清洗)。
- 气路漏气了(标气没通进去)。
- 传感器彻底老化(需要更换)。
你的代码可以增加的“高级感”
你可以给你的代码加一个小小的“安全锁”,防止校准出荒唐的数据:
|
|
校零函数和满量程校准函数
1. 校零函数 (Zero Calibration)
核心逻辑:截距修正 (Offset Correction)
在传感器没有任何压力(或通入零点标准气)时,记录当前的输出。
- 核心公式:$$V_{zero} = V_{current_filtered}$$
- 代码动作:
- 确保系统处于“零状态”(如通入纯氮气)。
- 读取经过滤波后的稳定电压值。
- 将该值覆盖保存到
zero_offset_volt变量中。
- 物理意义:告诉单片机:“不管电路漂移到了多少伏,从这一刻起,这个电压就代表 0 MPa。”
2. 满量程校准函数 (Span Calibration)
核心逻辑:增益/斜率修正 (Gain/Slope Correction)
在传感器承受标准满量程压力(如 1.6MPa)时,调整输出的放大倍数。
-
核心公式:$$Slope_K = \frac{P_{nominal}}{V_{full} - V_{zero}}$$ (其中 $P_{nominal}$ 是你预设的标准值,如 1.6)
-
代码动作:
- 确保系统处于“满量程状态”(如通入 1.6MPa 压力)。
- 计算当前的有效压差:
v_diff = V_current - V_zero。 - 安全检查:判断
v_diff是否足够大(防止除以 0 或误操作)。 - 计算并更新斜率
slope_k。
-
物理意义:告诉单片机:“现在压力是 1.6,电压差是这么大,请计算出每一伏电压代表多少 MPa。”